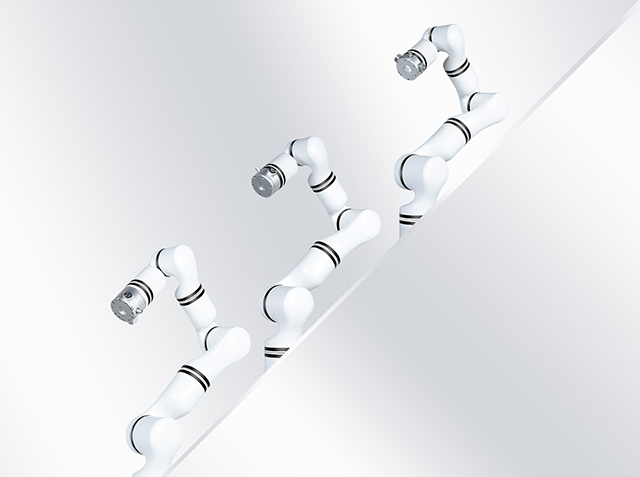




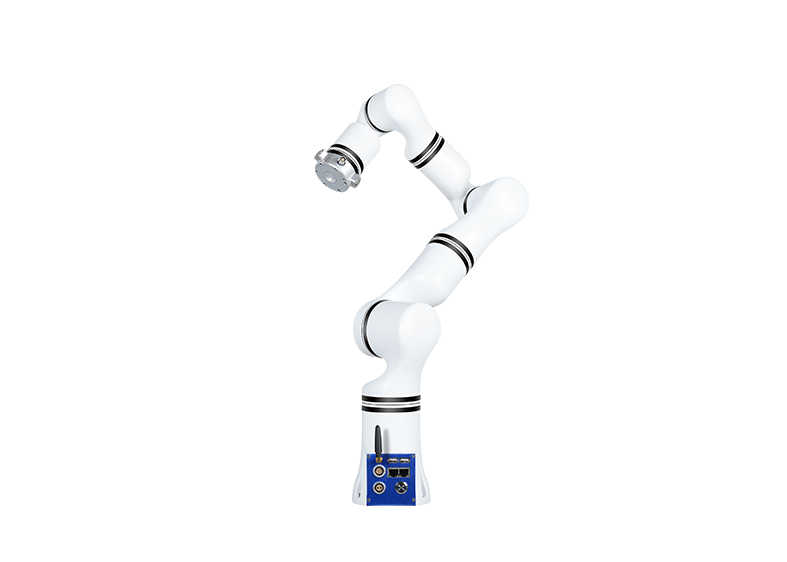









ECO65系列为睿尔曼公司自主研发生产的六自由度机械臂,一体化结构的控制柜与机械臂总重量7.8KG,有效负载达到5KG,峰值负载可达9KG,工作半径达610mm。
优势特点


超高负载自重比
超轻便机身,机械臂(含控制器)自重仅7.2Kg,有效负载达5Kg,拥有1:1.44的负载自重比,有效工作半径最高达610mm

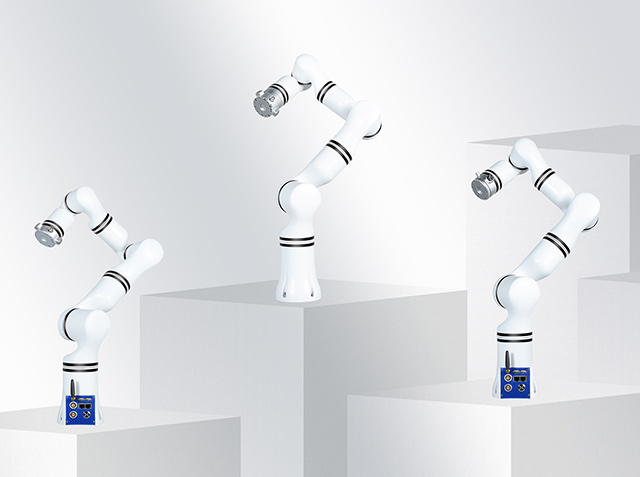
灵活部署
超小体积,机械臂最大直径11.5cm,机座安装尺寸11cm,仿人手臂尺寸,大大降低了安装空间要求,更方便灵活。


超低功率
直流24V供电,可适用于移动电源,在满负载情况下最大功耗≤200W,综合功耗≤100W,可应用于多种场景。
集成控制器
无传统控制柜,将控制器与机械臂完美融为一体。

超高兼容性
末端具备通用接口,灵活扩展,即插即用,一体化机械臂仍自带丰富接口,满足多行业应用需求扩展。


系统开放
开放的API函数库,支持C/C++/C#/Python编程语言,支持Windows/Linux/ROS机器人操作系统及多种通讯协议。
安全灵敏
灵敏的拖拽编程,可完整复现拖动轨迹;可设定防护等级,碰撞达到力矩上限,机械臂及时停止,避免人或设备受到伤害。

无线便捷互联
智能终端可通过有线和无线连接控制机械臂,任意切换,方便快捷,摆脱控制线缆束缚。
一体化模块化
一体化、模块化设计,拆装更便捷,维护成本低 ,效率更高。
集成度高
各部件采用一体化集成设计,方便维护,节省空间。
交互性好
设计方便易懂的人机交互界面,便于学习者能够更快的了解系统。
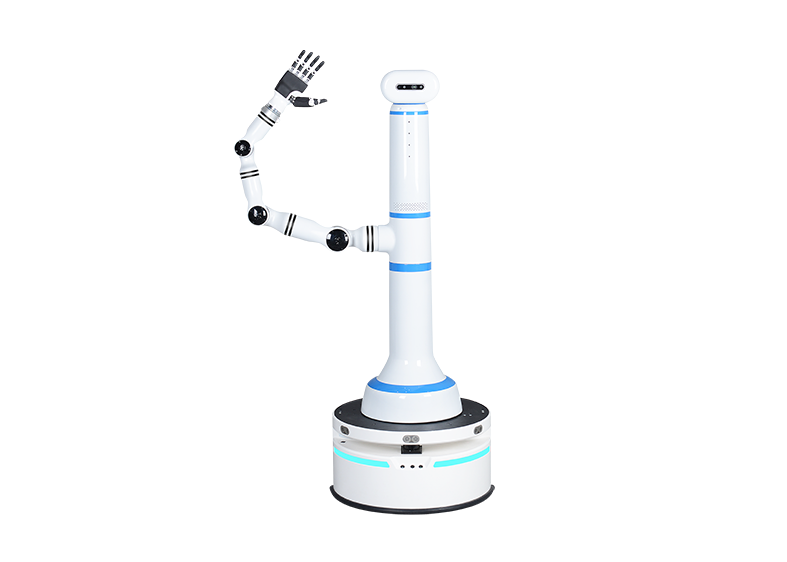
配置全面
集成了移动底盘、深度视觉、语音模块、机械臂、五指灵巧手等各种仿人功能设备。
功能丰富
传感器类型多样,各单元可进行单独控制也可以进行协同控制。
集成度高
将移动底盘、竖直导轨、机械臂、视觉传感器、末端工具通过主控模块集成于一体,方便维护,节省空间。
配置性高
集成了AGV移动机器人和机械臂,可搭载自动化夹具、视觉系统、智能螺丝刀等执行单元。
配置好
可语音播报,对操作步骤进行语音提示,有视觉定位与红外成像,可以对人体的体貌特征进行扫描及进行病情辅助诊断,可进行数据采集与传输。

干净卫生
末端按摩工具可清洁与更换,保证按摩中的干净与卫生,使用户更放心。























相关下载
产品手册
Gen-72产品手册
pdf|60.44M
睿尔曼产品宣传册V3.0_CN
PDF|5.46MB
关节资料
微悍动力关节宣传册V1.0_CN.pdf
PDF|2.20MB
用户手册
睿眼用户手册v0.4.6
pdf|2.54MB
睿尔曼机器人快速使用手册V1.5
PDF|1.1M
睿尔曼机器人WEB示教器用户手册-1.5
PDF|17.69M
机械臂软件
realeye_v0.4.6_x86_windows_gpu.zip
zip|6.51GB
realeye_v0.4.6_x86_windows_cpu.zip
zip|2.73GB
RM65 V6.1.4
ZIP|50.0MB
RM75 V6.1.4
ZIP|50.0MB
RML63 V6.1.4
ZIP|50.0MB
3D模型
ECO62
pdf|15.92M
ECO65-B
STP|5.23MB
ECO65-6F
STEP|11.1MB
RM65-B
STEP|9.61MB
RM65-ZF
STEP|10.0MB
RM65-6F
STEP|10.0MB
RM75-B
STEP|9.61MB
RM75-ZF
STEP|10.0MB
RM75-6F
STEP|10.0MB
RML63-B
STEP|5.58MB
尺寸图
ECO65 尺寸图
PDF|36.5KB
ECO65 安装图
PDF|22.6KB
末端安装尺寸图
PDF|28.4KB
RML63系列机械臂底座安装尺寸图
PDF|22.5KB
RML63 尺寸图
PDF|27.5KB
RM65、RM75系列机械臂底座安装尺寸图
PDF|21.3KB
RM65 尺寸图
PDF|73.9KB
RM75 尺寸图
PDF|76.9KB
开发协议
Gen-72 JSON通信协议v3.5.9
pdf|1.94M
睿尔曼机械臂JSON通信协议v3.5.7
MB|1.04
SDK
RM_API V4.2.8
zip|23.3M
睿尔曼机械臂接口函数说明(Python)V1.0
PDF|1.76MB
睿尔曼机械臂接口函数说明(MATLAB)V1.0
PDF|1.95MB
睿尔曼机械臂接口函数说明(c++)V4.2.5
PDF|1.83MB
睿尔曼机械臂接口函数说明(c)V4.2.5
PDF|1.82MB
睿尔曼机械臂SDK(C)示例文档
PDF|2.04MB
ROS
RM65系列URDF文件
zip|4.47kb
ROS2
zip|2.77MB
ROS1
zip|12.34MB