12小时内快速解决问题


7x24小时一对一微信服务群时时响应
pdf|60.44M
PDF|5.46MB
PDF|2.20MB
pdf|2.54MB
PDF|1.1M
PDF|17.69M
zip|6.51GB
zip|2.73GB
ZIP|50.0MB
ZIP|50.0MB
ZIP|50.0MB
pdf|15.92M
STP|5.23MB
STEP|11.1MB
STEP|9.61MB
STEP|10.0MB
STEP|10.0MB
STEP|9.61MB
STEP|10.0MB
STEP|10.0MB
STEP|5.58MB
PDF|36.5KB
PDF|22.6KB
PDF|28.4KB
PDF|22.5KB
PDF|27.5KB
PDF|21.3KB
PDF|73.9KB
PDF|76.9KB
pdf|1.94M
MB|1.04
zip|23.3M
PDF|1.76MB
PDF|1.95MB
PDF|1.83MB
PDF|1.82MB
PDF|2.04MB
zip|4.47kb
zip|2.77MB
zip|12.34MB
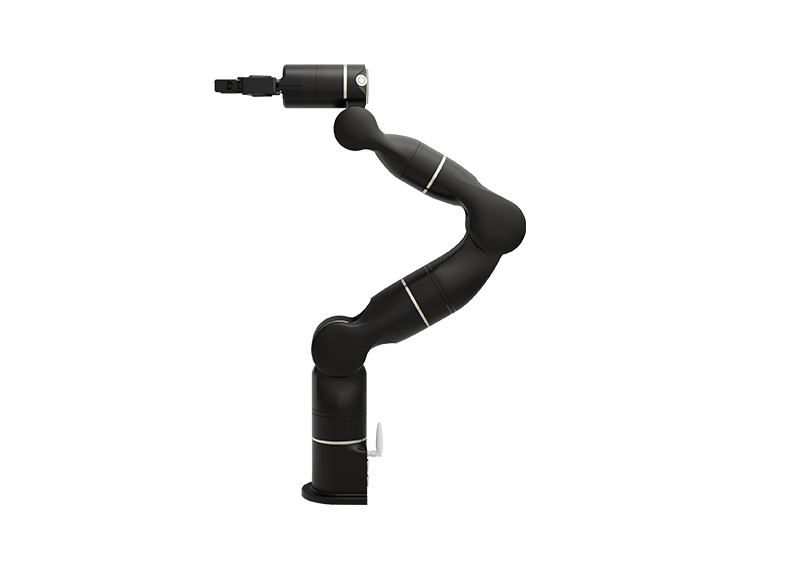
睿尔曼是一家专注于超轻量仿人机械臂研发,生产,销售于一体的国家级高新技术企业,可以提供超轻量仿人机械臂以及相关场景应用需求的集成设备。
睿尔曼是超轻量仿人机械臂的定义者,超轻量代表RM系列机械臂只有普通协作臂重量的1/4,负载可达5Kg,并完全仿照人手臂的实际尺寸和重量1:1打造,各关节也和人手臂相似,可以不对原有环境进行二次改造,真正实现机械臂与人与环境的友好共融。
机械臂与控制器一体化,无传统控制柜,标准版机械臂本体重量(含控制器)仅有7.2KG,除控制器外仅6KG,负载可达5KG,拥有1:1.2的负载自重比,超低功耗,直流24V供电,可适用于移动电源,在满负载情况下最大功耗≦200W,综合功耗≦100W。
超轻量仿人机械臂共有RM65、RM75、RML63三大产品系列,其中RM代表睿尔曼,L代表长臂展,首位数字代表轴数,6轴或为7轴机械臂,次位数字代表负载公斤数,每个系列又分为三款型号-B为标准版、-ZF为一维力版、-6F为六维力版。
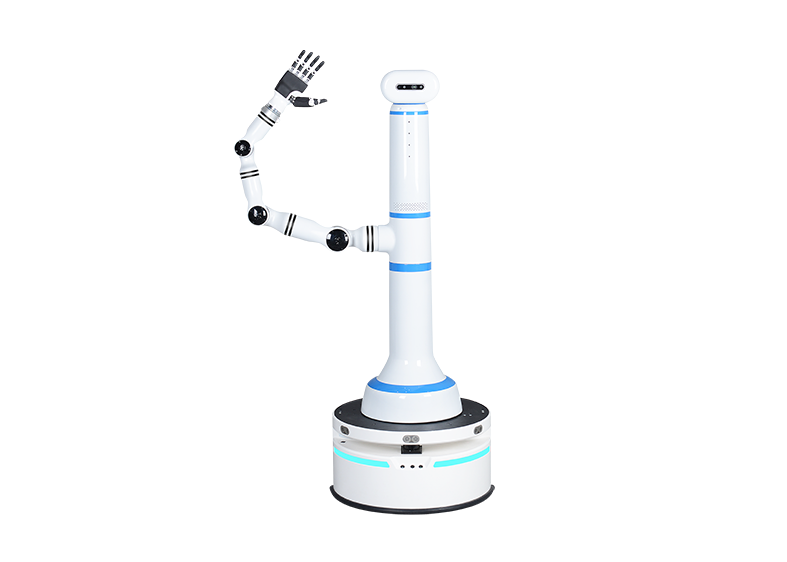
睿尔曼机械臂目前已广泛的应用于医疗、大健康、智能巡检、自动化实验室、科研教育、新餐饮、新零售、家庭服务、3C移载、物流仓储、工业生产、农业采摘等各行业,并具有相应的成功案例。
目前支持的二次开发形式有三种,一是通过API形式:目前支持C\C++\C#\python四种开发环境。二是通过JSON协议进行控制,此种方式不限制开发语言与开发系统。三是通过ROS进行控制,目前支持melodic与noetic两个版本。
软件是终身授权,目前对于软件的升级没有收费。
机械臂的供电电压范围是直流20V~27V,功率200W。但是供电设备最好能提供瞬间最大20A以上的电流,以供机械臂上电后初始化自整定使用。
机械臂额定负载下的连续运行的寿命是3万小时。目前已取得上海国家机器人检测中心做MTBF检测认证。
机械臂控制器内的程序都是公司的核心,暂不对外开放。
机械臂关节内部没有扭矩传感器,超轻量仿人机械臂是通过电流环来实现关节力控,即针对我们的机械臂而言,电流环控制等同力控。
对于有开发能力的客户,可以考虑选择性的开放,但事先会签署相关协议,用户可以根据力传感器数据接口进行力控开发,不需要单独开发接口。
透传是指用户自己使用上位机进行轨迹规划,然后将各关节的角度直接下发给控制器,不经过控制器的处理,各关节直接运行。机械臂运行的效果直接依赖于用户轨迹规划的水平。
WIFI透传周期最快20ms,普通网口(右侧)最快20ms,USB接口、485接口、高速网口(左侧)最快10ms。
主要用于验证用户算法或者结合视觉,在非结构环境下做动态轨迹规划实现抓取或者避障。
如果用户直接使用我们封装好的API,则只能在Linux/Windows环境下使用C/C++/C#/Python工程调用,或者使用ROS操作系统。
如果用户使用JSON协议,则灵活性会高很多。对用户的系统和编程语言没有任何限制,只要能根据协议发送出固定的字符串即可。
可以。机械臂RS485接口可用来控制Modbus协议的外设,例如传感器或者夹爪等。也可以通过RS485接口控制机械臂。需要通过指令进行模式切换,但不能两种模式同时使用。
机械臂末端可对外输出5V/12V/24V,最大输出电流1.5A。具备RS485通信接口,可支持标准的Modbus RTU协议的设备。
同时,我们将因时的两指夹爪和五指灵巧手的驱动写在末端控制板了,可以直接使用。
拖动和复现过程中都可对夹爪操作,目前该功能暂时仅适用于因时的两指夹爪,后续会增大支持范围。
拖动示教轨迹时可以保存的,可通过示教器及函数接口进行调用。
ZF版本和6F版本机械臂内部带有力控算法模块,可直接在示教器配置使用,同时用户可直接读取传感器数据,在上位机开发自己的算法。
机械臂示教器可对碰撞等级做设置,等级共分0~8,上电后机械臂默认碰撞检测不打开。
碰撞等级越高,检测越灵敏,同时越容易发生误碰撞停止,用户根据使用需求设置。

微信公众号

抖音号

视频号
©2021 睿尔曼智能科技(北京)有限公司 版权所有 | 京ICP备20031630号-1 技术支持:同创广告

填写您的信息后可自动下载